Diffusers documentation
Marigold Computer Vision
Marigold Computer Vision
Marigold is a diffusion-based method and a collection of pipelines designed for dense computer vision tasks, including monocular depth prediction, surface normals estimation, and intrinsic image decomposition.
This guide will walk you through using Marigold to generate fast and high-quality predictions for images and videos.
Each pipeline is tailored for a specific computer vision task, processing an input RGB image and generating a corresponding prediction. Currently, the following computer vision tasks are implemented:
| Pipeline | Recommended Model Checkpoints | Spaces (Interactive Apps) | Predicted Modalities |
|---|---|---|---|
| MarigoldDepthPipeline | prs-eth/marigold-depth-v1-1 | Depth Estimation | Depth, Disparity |
| MarigoldNormalsPipeline | prs-eth/marigold-normals-v1-1 | Surface Normals Estimation | Surface normals |
| MarigoldIntrinsicsPipeline | prs-eth/marigold-iid-appearance-v1-1, prs-eth/marigold-iid-lighting-v1-1 | Intrinsic Image Decomposition | Albedo, Materials, Lighting |
All original checkpoints are available under the PRS-ETH organization on Hugging Face. They are designed for use with diffusers pipelines and the original codebase, which can also be used to train new model checkpoints. The following is a summary of the recommended checkpoints, all of which produce reliable results with 1 to 4 steps.
| Checkpoint | Modality | Comment |
|---|---|---|
| prs-eth/marigold-depth-v1-1 | Depth | Affine-invariant depth prediction assigns each pixel a value between 0 (near plane) and 1 (far plane), with both planes determined by the model during inference. |
| prs-eth/marigold-normals-v0-1 | Normals | The surface normals predictions are unit-length 3D vectors in the screen space camera, with values in the range from -1 to 1. |
| prs-eth/marigold-iid-appearance-v1-1 | Intrinsics | InteriorVerse decomposition is comprised of Albedo and two BRDF material properties: Roughness and Metallicity. |
| prs-eth/marigold-iid-lighting-v1-1 | Intrinsics | HyperSim decomposition of an image is comprised of Albedo, Diffuse shading, and Non-diffuse residual:. |
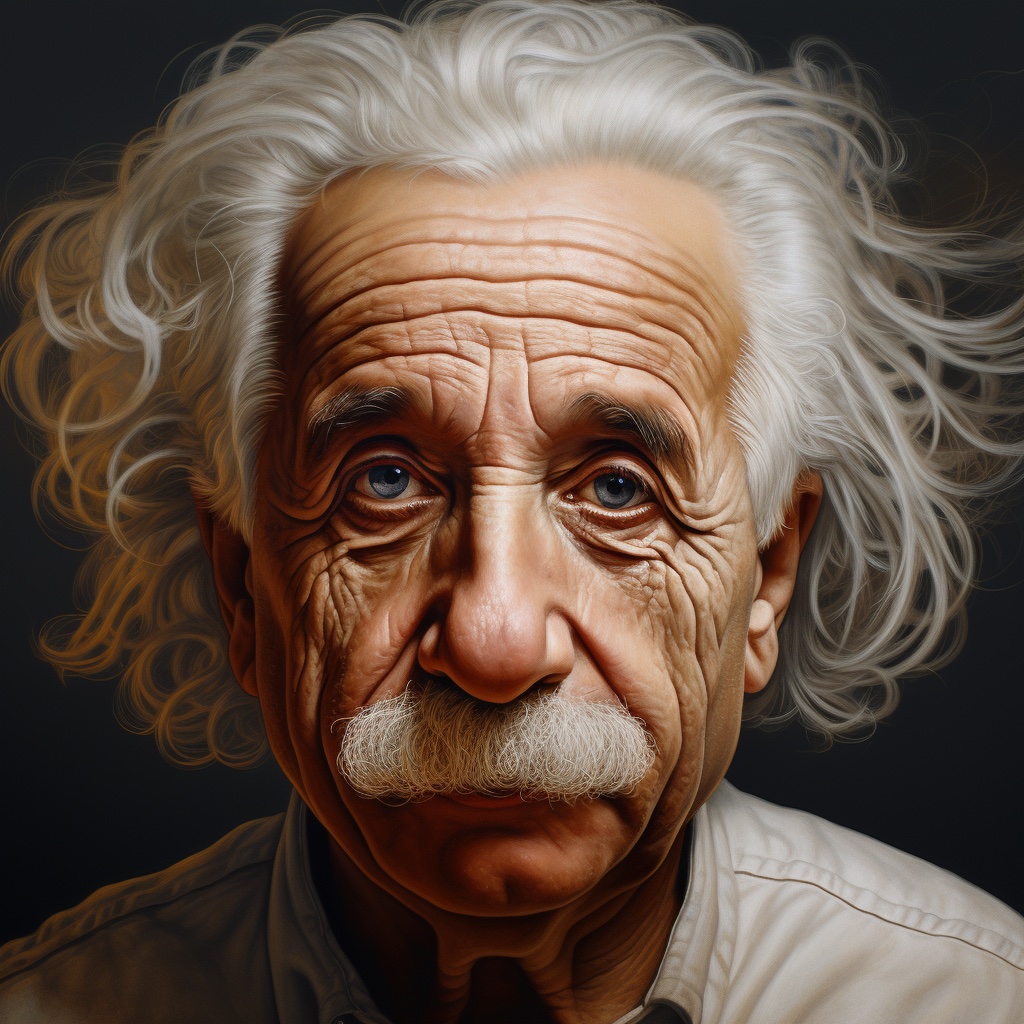
The examples below are mostly given for depth prediction, but they can be universally applied to other supported modalities. We showcase the predictions using the same input image of Albert Einstein generated by Midjourney. This makes it easier to compare visualizations of the predictions across various modalities and checkpoints.
Depth Prediction
To get a depth prediction, load the prs-eth/marigold-depth-v1-1 checkpoint into MarigoldDepthPipeline,
put the image through the pipeline, and save the predictions:
import diffusers
import torch
pipe = diffusers.MarigoldDepthPipeline.from_pretrained(
"prs-eth/marigold-depth-v1-1", variant="fp16", torch_dtype=torch.float16
).to("cuda")
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
depth = pipe(image)
vis = pipe.image_processor.visualize_depth(depth.prediction)
vis[0].save("einstein_depth.png")
depth_16bit = pipe.image_processor.export_depth_to_16bit_png(depth.prediction)
depth_16bit[0].save("einstein_depth_16bit.png")The visualize_depth() function applies one of
matplotlib’s colormaps (Spectral by default) to map the predicted pixel values from a single-channel [0, 1]
depth range into an RGB image.
With the Spectral colormap, pixels with near depth are painted red, and far pixels are blue.
The 16-bit PNG file stores the single channel values mapped linearly from the [0, 1] range into [0, 65535].
Below are the raw and the visualized predictions. The darker and closer areas (mustache) are easier to distinguish in
the visualization.


Surface Normals Estimation
Load the prs-eth/marigold-normals-v1-1 checkpoint into MarigoldNormalsPipeline, put the image through the
pipeline, and save the predictions:
import diffusers
import torch
pipe = diffusers.MarigoldNormalsPipeline.from_pretrained(
"prs-eth/marigold-normals-v1-1", variant="fp16", torch_dtype=torch.float16
).to("cuda")
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
normals = pipe(image)
vis = pipe.image_processor.visualize_normals(normals.prediction)
vis[0].save("einstein_normals.png")The visualize_normals() maps the three-dimensional
prediction with pixel values in the range [-1, 1] into an RGB image.
The visualization function supports flipping surface normals axes to make the visualization compatible with other
choices of the frame of reference.
Conceptually, each pixel is painted according to the surface normal vector in the frame of reference, where X axis
points right, Y axis points up, and Z axis points at the viewer.
Below is the visualized prediction:

In this example, the nose tip almost certainly has a point on the surface, in which the surface normal vector points
straight at the viewer, meaning that its coordinates are [0, 0, 1].
This vector maps to the RGB [128, 128, 255], which corresponds to the violet-blue color.
Similarly, a surface normal on the cheek in the right part of the image has a large X component, which increases the
red hue.
Points on the shoulders pointing up with a large Y promote green color.
Intrinsic Image Decomposition
Marigold provides two models for Intrinsic Image Decomposition (IID): “Appearance” and “Lighting”. Each model produces Albedo maps, derived from InteriorVerse and Hypersim annotations, respectively.
- The “Appearance” model also estimates Material properties: Roughness and Metallicity.
- The “Lighting” model generates Diffuse Shading and Non-diffuse Residual.
Here is the sample code saving predictions made by the “Appearance” model:
import diffusers
import torch
pipe = diffusers.MarigoldIntrinsicsPipeline.from_pretrained(
"prs-eth/marigold-iid-appearance-v1-1", variant="fp16", torch_dtype=torch.float16
).to("cuda")
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
intrinsics = pipe(image)
vis = pipe.image_processor.visualize_intrinsics(intrinsics.prediction, pipe.target_properties)
vis[0]["albedo"].save("einstein_albedo.png")
vis[0]["roughness"].save("einstein_roughness.png")
vis[0]["metallicity"].save("einstein_metallicity.png")Another example demonstrating the predictions made by the “Lighting” model:
import diffusers
import torch
pipe = diffusers.MarigoldIntrinsicsPipeline.from_pretrained(
"prs-eth/marigold-iid-lighting-v1-1", variant="fp16", torch_dtype=torch.float16
).to("cuda")
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
intrinsics = pipe(image)
vis = pipe.image_processor.visualize_intrinsics(intrinsics.prediction, pipe.target_properties)
vis[0]["albedo"].save("einstein_albedo.png")
vis[0]["shading"].save("einstein_shading.png")
vis[0]["residual"].save("einstein_residual.png")Both models share the same pipeline while supporting different decomposition types.
The exact decomposition parameterization (e.g., sRGB vs. linear space) is stored in the
pipe.target_properties dictionary, which is passed into the
visualize_intrinsics() function.
Below are some examples showcasing the predicted decomposition outputs. All modalities can be inspected in the Intrinsic Image Decomposition Space.


Speeding up inference
The above quick start snippets are already optimized for quality and speed, loading the checkpoint, utilizing the
fp16 variant of weights and computation, and performing the default number (4) of denoising diffusion steps.
The first step to accelerate inference, at the expense of prediction quality, is to reduce the denoising diffusion
steps to the minimum:
import diffusers
import torch
pipe = diffusers.MarigoldDepthPipeline.from_pretrained(
"prs-eth/marigold-depth-v1-1", variant="fp16", torch_dtype=torch.float16
).to("cuda")
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
- depth = pipe(image)
+ depth = pipe(image, num_inference_steps=1)With this change, the pipe call completes in 280ms on RTX 3090 GPU.
Internally, the input image is first encoded using the Stable Diffusion VAE encoder, followed by a single denoising
step performed by the U-Net.
Finally, the prediction latent is decoded with the VAE decoder into pixel space.
In this setup, two out of three module calls are dedicated to converting between the pixel and latent spaces of the LDM.
Since Marigold’s latent space is compatible with Stable Diffusion 2.0, inference can be accelerated by more than 3x,
reducing the call time to 85ms on an RTX 3090, by using a lightweight replacement of the SD VAE.
Note that using a lightweight VAE may slightly reduce the visual quality of the predictions.
import diffusers
import torch
pipe = diffusers.MarigoldDepthPipeline.from_pretrained(
"prs-eth/marigold-depth-v1-1", variant="fp16", torch_dtype=torch.float16
).to("cuda")
+ pipe.vae = diffusers.AutoencoderTiny.from_pretrained(
+ "madebyollin/taesd", torch_dtype=torch.float16
+ ).cuda()
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
depth = pipe(image, num_inference_steps=1)So far, we have optimized the number of diffusion steps and model components. Self-attention operations account for a significant portion of computations. Speeding them up can be achieved by using a more efficient attention processor:
import diffusers
import torch
+ from diffusers.models.attention_processor import AttnProcessor2_0
pipe = diffusers.MarigoldDepthPipeline.from_pretrained(
"prs-eth/marigold-depth-v1-1", variant="fp16", torch_dtype=torch.float16
).to("cuda")
+ pipe.vae.set_attn_processor(AttnProcessor2_0())
+ pipe.unet.set_attn_processor(AttnProcessor2_0())
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
depth = pipe(image, num_inference_steps=1)Finally, as suggested in Optimizations, enabling torch.compile can further enhance performance depending on
the target hardware.
However, compilation incurs a significant overhead during the first pipeline invocation, making it beneficial only when
the same pipeline instance is called repeatedly, such as within a loop.
import diffusers
import torch
from diffusers.models.attention_processor import AttnProcessor2_0
pipe = diffusers.MarigoldDepthPipeline.from_pretrained(
"prs-eth/marigold-depth-v1-1", variant="fp16", torch_dtype=torch.float16
).to("cuda")
pipe.vae.set_attn_processor(AttnProcessor2_0())
pipe.unet.set_attn_processor(AttnProcessor2_0())
+ pipe.vae = torch.compile(pipe.vae, mode="reduce-overhead", fullgraph=True)
+ pipe.unet = torch.compile(pipe.unet, mode="reduce-overhead", fullgraph=True)
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
depth = pipe(image, num_inference_steps=1)Maximizing Precision and Ensembling
Marigold pipelines have a built-in ensembling mechanism combining multiple predictions from different random latents.
This is a brute-force way of improving the precision of predictions, capitalizing on the generative nature of diffusion.
The ensembling path is activated automatically when the ensemble_size argument is set greater or equal than 3.
When aiming for maximum precision, it makes sense to adjust num_inference_steps simultaneously with ensemble_size.
The recommended values vary across checkpoints but primarily depend on the scheduler type.
The effect of ensembling is particularly well-seen with surface normals:
import diffusers
pipe = diffusers.MarigoldNormalsPipeline.from_pretrained("prs-eth/marigold-normals-v1-1").to("cuda")
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
- depth = pipe(image)
+ depth = pipe(image, num_inference_steps=10, ensemble_size=5)
vis = pipe.image_processor.visualize_normals(depth.prediction)
vis[0].save("einstein_normals.png") 
As can be seen, all areas with fine-grained structurers, such as hair, got more conservative and on average more correct predictions. Such a result is more suitable for precision-sensitive downstream tasks, such as 3D reconstruction.
Frame-by-frame Video Processing with Temporal Consistency
Due to Marigold’s generative nature, each prediction is unique and defined by the random noise sampled for the latent initialization. This becomes an obvious drawback compared to traditional end-to-end dense regression networks, as exemplified in the following videos:


To address this issue, it is possible to pass latents argument to the pipelines, which defines the starting point of
diffusion.
Empirically, we found that a convex combination of the very same starting point noise latent and the latent
corresponding to the previous frame prediction give sufficiently smooth results, as implemented in the snippet below:
import imageio
import diffusers
import torch
from diffusers.models.attention_processor import AttnProcessor2_0
from PIL import Image
from tqdm import tqdm
device = "cuda"
path_in = "https://huggingface.co./spaces/prs-eth/marigold-lcm/resolve/c7adb5427947d2680944f898cd91d386bf0d4924/files/video/obama.mp4"
path_out = "obama_depth.gif"
pipe = diffusers.MarigoldDepthPipeline.from_pretrained(
"prs-eth/marigold-depth-v1-1", variant="fp16", torch_dtype=torch.float16
).to(device)
pipe.vae = diffusers.AutoencoderTiny.from_pretrained(
"madebyollin/taesd", torch_dtype=torch.float16
).to(device)
pipe.unet.set_attn_processor(AttnProcessor2_0())
pipe.vae = torch.compile(pipe.vae, mode="reduce-overhead", fullgraph=True)
pipe.unet = torch.compile(pipe.unet, mode="reduce-overhead", fullgraph=True)
pipe.set_progress_bar_config(disable=True)
with imageio.get_reader(path_in) as reader:
size = reader.get_meta_data()['size']
last_frame_latent = None
latent_common = torch.randn(
(1, 4, 768 * size[1] // (8 * max(size)), 768 * size[0] // (8 * max(size)))
).to(device=device, dtype=torch.float16)
out = []
for frame_id, frame in tqdm(enumerate(reader), desc="Processing Video"):
frame = Image.fromarray(frame)
latents = latent_common
if last_frame_latent is not None:
latents = 0.9 * latents + 0.1 * last_frame_latent
depth = pipe(
frame,
num_inference_steps=1,
match_input_resolution=False,
latents=latents,
output_latent=True,
)
last_frame_latent = depth.latent
out.append(pipe.image_processor.visualize_depth(depth.prediction)[0])
diffusers.utils.export_to_gif(out, path_out, fps=reader.get_meta_data()['fps'])Here, the diffusion process starts from the given computed latent.
The pipeline sets output_latent=True to access out.latent and computes its contribution to the next frame’s latent
initialization.
The result is much more stable now:

Marigold for ControlNet
A very common application for depth prediction with diffusion models comes in conjunction with ControlNet. Depth crispness plays a crucial role in obtaining high-quality results from ControlNet. As seen in comparisons with other methods above, Marigold excels at that task. The snippet below demonstrates how to load an image, compute depth, and pass it into ControlNet in a compatible format:
import torch
import diffusers
device = "cuda"
generator = torch.Generator(device=device).manual_seed(2024)
image = diffusers.utils.load_image(
"https://huggingface.co./datasets/huggingface/documentation-images/resolve/main/diffusers/controlnet_depth_source.png"
)
pipe = diffusers.MarigoldDepthPipeline.from_pretrained(
"prs-eth/marigold-depth-v1-1", torch_dtype=torch.float16, variant="fp16"
).to(device)
depth_image = pipe(image, generator=generator).prediction
depth_image = pipe.image_processor.visualize_depth(depth_image, color_map="binary")
depth_image[0].save("motorcycle_controlnet_depth.png")
controlnet = diffusers.ControlNetModel.from_pretrained(
"diffusers/controlnet-depth-sdxl-1.0", torch_dtype=torch.float16, variant="fp16"
).to(device)
pipe = diffusers.StableDiffusionXLControlNetPipeline.from_pretrained(
"SG161222/RealVisXL_V4.0", torch_dtype=torch.float16, variant="fp16", controlnet=controlnet
).to(device)
pipe.scheduler = diffusers.DPMSolverMultistepScheduler.from_config(pipe.scheduler.config, use_karras_sigmas=True)
controlnet_out = pipe(
prompt="high quality photo of a sports bike, city",
negative_prompt="",
guidance_scale=6.5,
num_inference_steps=25,
image=depth_image,
controlnet_conditioning_scale=0.7,
control_guidance_end=0.7,
generator=generator,
).images
controlnet_out[0].save("motorcycle_controlnet_out.png")


Quantitative Evaluation
To evaluate Marigold quantitatively in standard leaderboards and benchmarks (such as NYU, KITTI, and other datasets),
follow the evaluation protocol outlined in the paper: load the full precision fp32 model and use appropriate values
for num_inference_steps and ensemble_size.
Optionally seed randomness to ensure reproducibility.
Maximizing batch_size will deliver maximum device utilization.
import diffusers
import torch
device = "cuda"
seed = 2024
generator = torch.Generator(device=device).manual_seed(seed)
pipe = diffusers.MarigoldDepthPipeline.from_pretrained("prs-eth/marigold-depth-v1-1").to(device)
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
depth = pipe(
image,
num_inference_steps=4, # set according to the evaluation protocol from the paper
ensemble_size=10, # set according to the evaluation protocol from the paper
generator=generator,
)
# evaluate metricsUsing Predictive Uncertainty
The ensembling mechanism built into Marigold pipelines combines multiple predictions obtained from different random
latents.
As a side effect, it can be used to quantify epistemic (model) uncertainty; simply specify ensemble_size greater
or equal than 3 and set output_uncertainty=True.
The resulting uncertainty will be available in the uncertainty field of the output.
It can be visualized as follows:
import diffusers
import torch
pipe = diffusers.MarigoldDepthPipeline.from_pretrained(
"prs-eth/marigold-depth-v1-1", variant="fp16", torch_dtype=torch.float16
).to("cuda")
image = diffusers.utils.load_image("https://marigoldmonodepth.github.io/images/einstein.jpg")
depth = pipe(
image,
ensemble_size=10, # any number >= 3
output_uncertainty=True,
)
uncertainty = pipe.image_processor.visualize_uncertainty(depth.uncertainty)
uncertainty[0].save("einstein_depth_uncertainty.png")


The interpretation of uncertainty is easy: higher values (white) correspond to pixels, where the model struggles to make consistent predictions.
- The depth model exhibits the most uncertainty around discontinuities, where object depth changes abruptly.
- The surface normals model is least confident in fine-grained structures like hair and in dark regions such as the collar area.
- Albedo uncertainty is represented as an RGB image, as it captures uncertainty independently for each color channel, unlike depth and surface normals. It is also higher in shaded regions and at discontinuities.
Conclusion
We hope Marigold proves valuable for your downstream tasks, whether as part of a broader generative workflow or for perception-based applications like 3D reconstruction.
< > Update on GitHub